Jingtao Tang (汤景韬)
todd.j.tang@gmail.com
reso1 /
Google Scholar
reso1.github.io/blog
Education
-
Ph.D. Candidate, Computing Science, SFU (Jan. '23 – Present)
Dissertation: Mixed Discrete—Continuous Planning on Graphs of Convex Sets (Tentative; May 2027) -
M.Eng., Software Engineering, ECNU (Sep. '18 – Jun. '21)
Dissertation: Multi-Robot Coverage Path and Motion Planning Algorithms for Complex Terrain B.Eng., Software Engineering, ECNU (Sep. '14 – Jun. '18)
Research Interests
- Artificial Intelligence
- Heuristic Search
- Multi-Robot Systems
- Combinatorial Optimization
Academic Service
- Organizer: NWRS (2025)
- Conference reviewer: ICRA, IROS, AAAI, ECAI, ICAPS
- Journal reviewer: T-RO, T-Mech, RA-L, JFR, RAS, EAAI
- Volunteer: ROS Summer School China (2018–2020), AAAI (2024), AI/CRV (2026)
Talks
AI/CRV Nectar Track (May. 2026): Space-Time Graphs of Convex Sets for Multi-Robot Motion Planning & GHOST: Solving the Traveling Salesman Problem on Graphs of Convex Sets
SFU-Robotics Seminar (Dec. 2025): A Tutorial on GCS for Mixed Discrete—Continuous Planning in Robotics
NWRS (Jun. 2025): Large-Scale Multi-Robot Coverage Path Planning on Grids with Path Deconfliction
This website is hosted on GitHub Pages (Jekyll Minimal theme by orderedlist)
Projection Formats for Encoding 360 VR Video
In this project, we aim to improve the user experience of remote telepresense for human operators in a Multi-robot System (MRS), e.g., the ecological restoration MRS. We designed efficient projections for spherical VR content obtained from 360 degree spherical cameras mounted on robots.
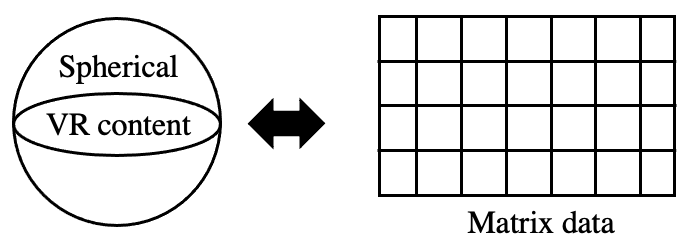 Figure: Converting the 360 VR spherical content to conventional matrix data.
Figure: Converting the 360 VR spherical content to conventional matrix data.
The major challenge is to design continuous and distortion-less projection to convert from sphere to rectangular plane by surface parameterization, as shown in the above figure. Based on the equirectangular projections, we proposed a hybrid projection format to fuse two types of projections with compact frame packing schemes.
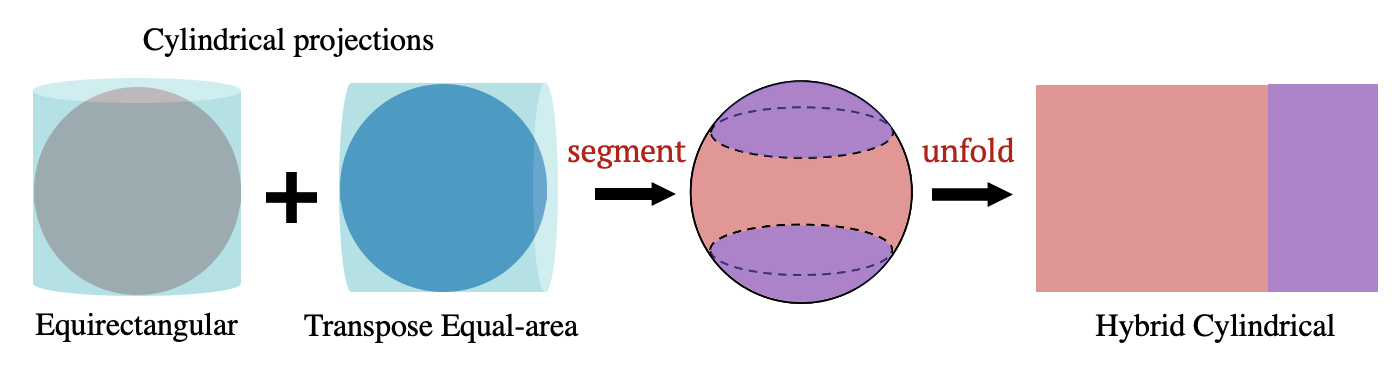 Figure: Combining the projection formats of ERP and Transpose-EAP.
Figure: Combining the projection formats of ERP and Transpose-EAP.
We desgined three compact frame packing schemes for the hybrid projection. The demonstration of stretching and discontinuity (QoE) of the formats are shown in the figure below. This paper leads to a conference publication at IEEE-VR 2019, and the basic idea is described in the below figure.
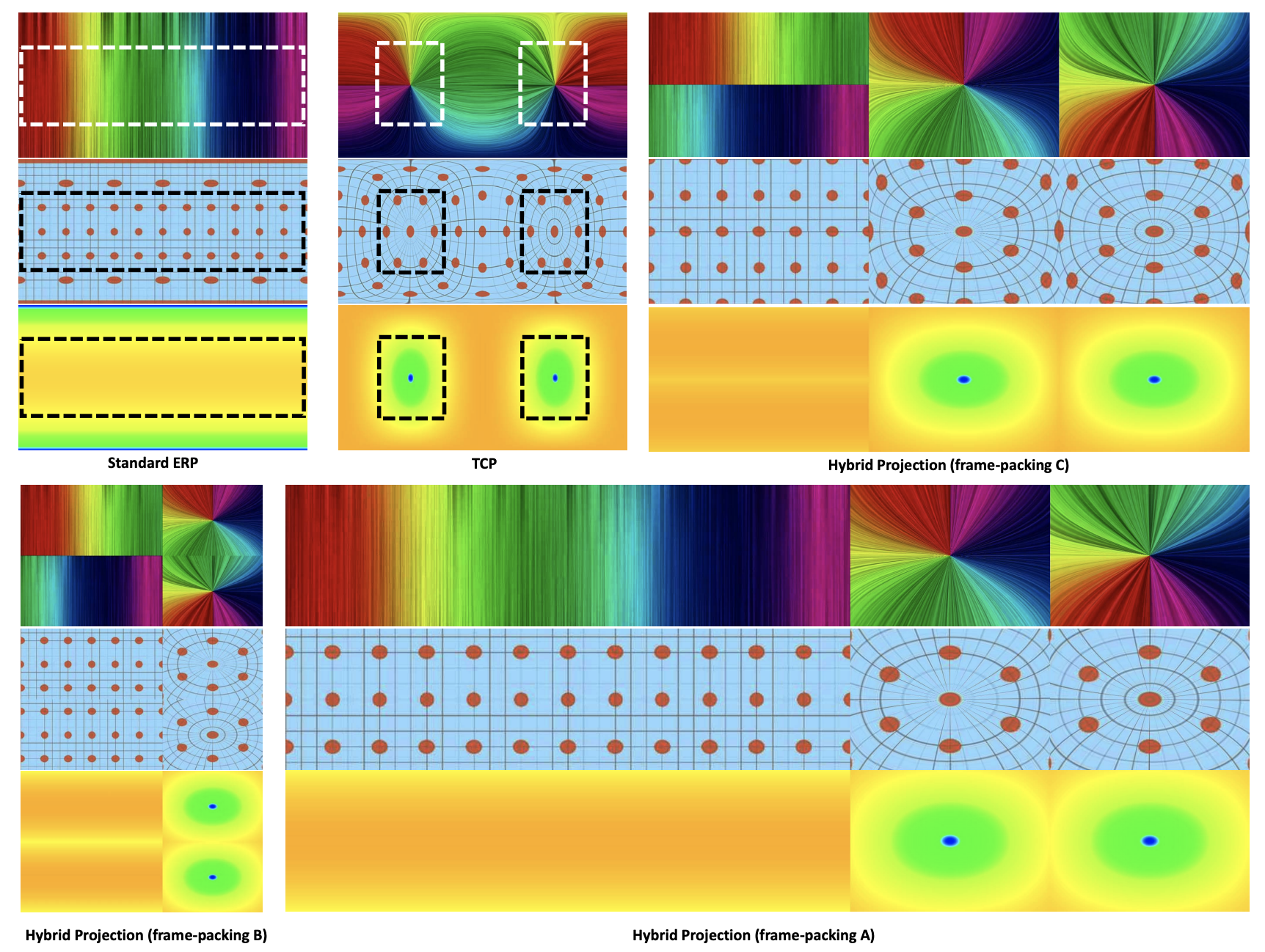 Figure: QoE of Projections, (a)(b) are two basic cylindrical projections ERP and TCP. (c)(d)(e) are three frame-packing layouts under hybrid projections. The top, middle and bottom graphs from (a) to (e) is to demonstrate discontinuity, distortion and pixel density.
Figure: QoE of Projections, (a)(b) are two basic cylindrical projections ERP and TCP. (c)(d)(e) are three frame-packing layouts under hybrid projections. The top, middle and bottom graphs from (a) to (e) is to demonstrate discontinuity, distortion and pixel density.
Based on the polyhedron projections, we designed a generalized cubemap projection via numerical approximation to minimize the area stretching ratio.
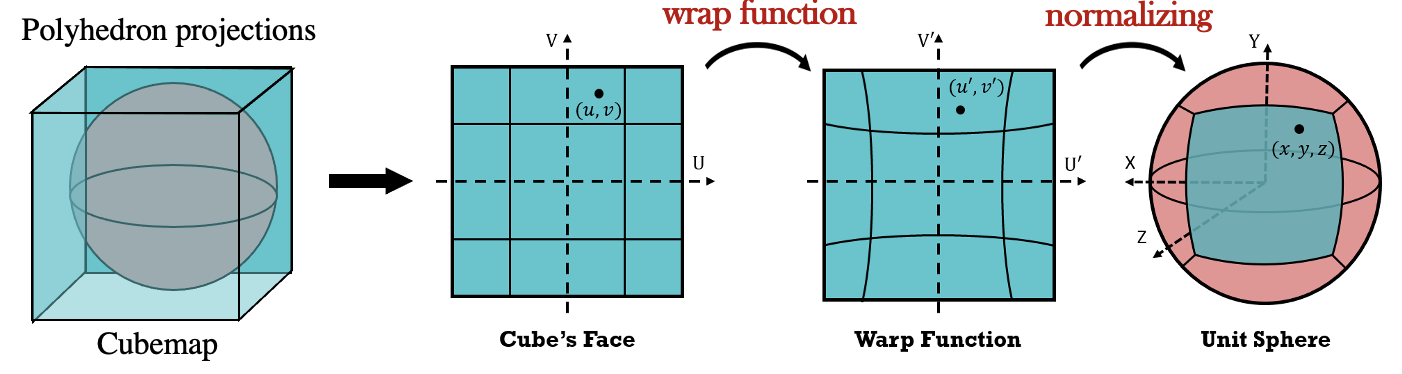 Figure: Generalized polynomial approximation based on Cubemap projeciton.
Figure: Generalized polynomial approximation based on Cubemap projeciton.
In order to characterize local distortions caused by projection, we use Tissot’s indicatrix to visualize the magnitude of distortion at given sample points as shown in the figure below. This work lead to a journal publication at Pacific Graphics / Computer Graphics Forum 2019, and the basic idea is described in the below figure.
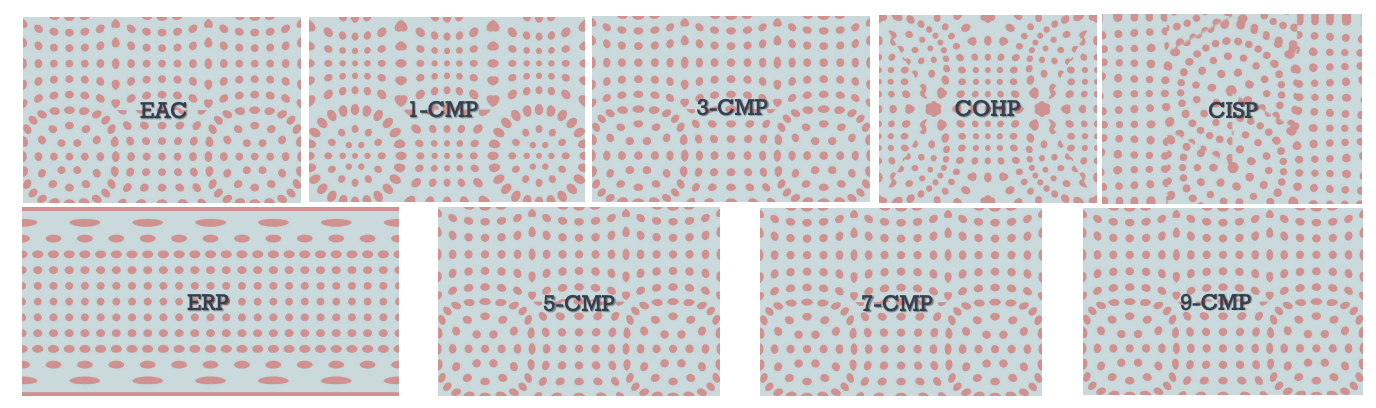 Figure: The Tissot’s indicatrix map, the higher order CMP, the less projection distortion.
Figure: The Tissot’s indicatrix map, the higher order CMP, the less projection distortion.