Jingtao Tang (汤景韬)
todd.j.tang@gmail.com
reso1 /
Google Scholar
reso1.github.io/blog
Education
-
Ph.D. Candidate, Computing Science, SFU (Jan. '23 – Present)
Dissertation: Mixed Discrete—Continuous Planning on Graphs of Convex Sets (Tentative; May 2027) -
M.Eng., Software Engineering, ECNU (Sep. '18 – Jun. '21)
Dissertation: Multi-Robot Coverage Path and Motion Planning Algorithms for Complex Terrain B.Eng., Software Engineering, ECNU (Sep. '14 – Jun. '18)
Research Interests
- Artificial Intelligence
- Heuristic Search
- Multi-Robot Systems
- Combinatorial Optimization
Academic Service
- Organizer: NWRS (2025)
- Conference reviewer: ICRA, IROS, AAAI, ECAI, ICAPS
- Journal reviewer: T-RO, T-Mech, RA-L, JFR, RAS, EAAI
- Volunteer: ROS Summer School China (2018–2020), AAAI (2024), AI/CRV (2026)
Talks
AI/CRV Nectar Track (May. 2026): Space-Time Graphs of Convex Sets for Multi-Robot Motion Planning & GHOST: Solving the Traveling Salesman Problem on Graphs of Convex Sets
SFU-Robotics Seminar (Dec. 2025): A Tutorial on GCS for Mixed Discrete—Continuous Planning in Robotics
NWRS (Jun. 2025): Large-Scale Multi-Robot Coverage Path Planning on Grids with Path Deconfliction
This website is hosted on GitHub Pages (Jekyll Minimal theme by orderedlist)
Project motivation
Robot Swarms for Large-scale Ecological Restoration Task
In this project, we aimed to designing multiple robots with heterogeneous functionalities and abilities to carry out ecologic restoration tasks on desertified lands. Simply speaking, we consider such task as large-scale tree planting task. Furthermore, we decompose it into drilling, watering and seeding phase, each carried out by a type of dedicated robot.
By continuing works on this project, our designed drilling and watering robots have been successfully tested in inner-Mongolia desert in China. Our work has been acknowledged with several patents as well as student entrepreneurship competitions including bronze medal of the Shanghai Challenge Cup, and it was further covered by medias including the 1st channel of China Central Television.
My major contributions were developing ROS packages for localization, navigation, and task and motion planning in Gazebo simulation, which has been successfully tested on drilling and watering robots in two desert areas at Xinjiang and Inner Mongolia.
Research Problem
Multi-robot Coverage Path Planning
In this project, After which, we abstracted the ecologic restoration task as Multi-robot Coverage Path Planning (mCPP) problem under several practical considerations. These considerations can be summarized as the following physical constraints: 1) terrain traversability of mobile robots in the fields; 2) limited capabilities such as energy and consumables; 3) fault-tolerance towards uncertainties and malfunctions.
Therefore, we first designed a learning-based algorithm to generate the terrain traversability map, and then proposed a graph-based planning algorithm that greedily finds sub-optimal balanced cutoff points to make coverage planning for each robot. My contributions were co-implementing the traversability map generating algorithm, and designing and implementing of the whole planning algorithm. The work lead to a conference publication at ICRA 2021.
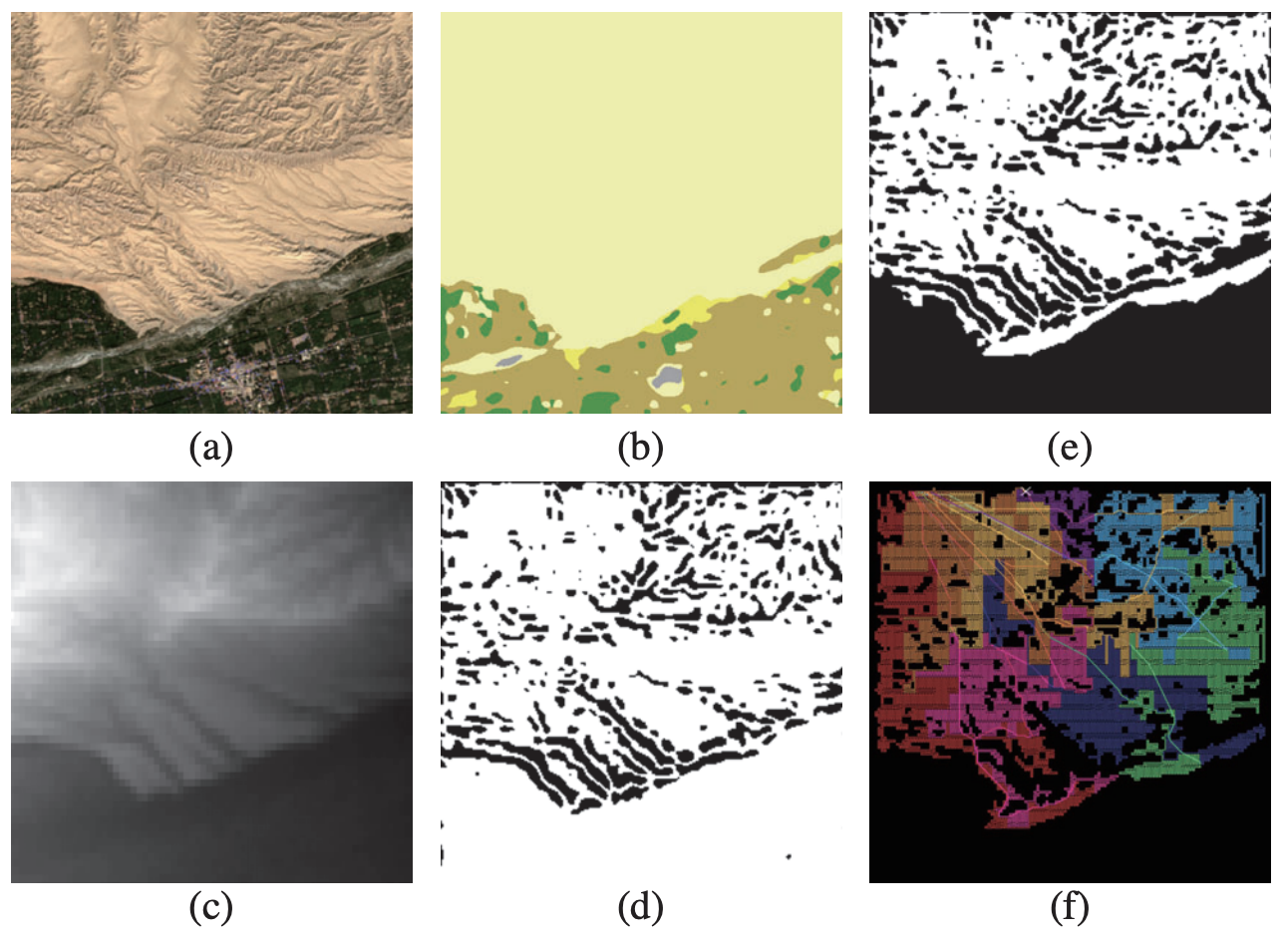 Figure: Traversability analysis of a field terrain around (78.48◦E,
37.22◦N).(a) Satellite map image. (b) Land cover predict. (c) DEM representing the height information. (d) DEM filtering reulst. (e) The fusion result
of land cover predict and DEM filtering. (f) The coverage path planning on
the terrain.
Figure: Traversability analysis of a field terrain around (78.48◦E,
37.22◦N).(a) Satellite map image. (b) Land cover predict. (c) DEM representing the height information. (d) DEM filtering reulst. (e) The fusion result
of land cover predict and DEM filtering. (f) The coverage path planning on
the terrain.
Also, since fault tolerance is very important for multi-robot systems especially for those operated in remote environments, we consider cases where robots can malfunction based on the preivous MSTC* work. This extension work lead to another conference publication at RCAR 2021.
Motion Planning on Complex Terrain
Generating feasible trajectories on rough terrain is a challenge for MRS working on desertified lands. In addition to the mCPP problem, when waypoints are provided by the mCPP planner. I also designed a dynamic-window approach to evaluate trajectory maneuvers in the hybrid A* algorithm. The proposed motion planning algorithm can avoid infeasible trajectories under rough terrain during the heuristic search process.
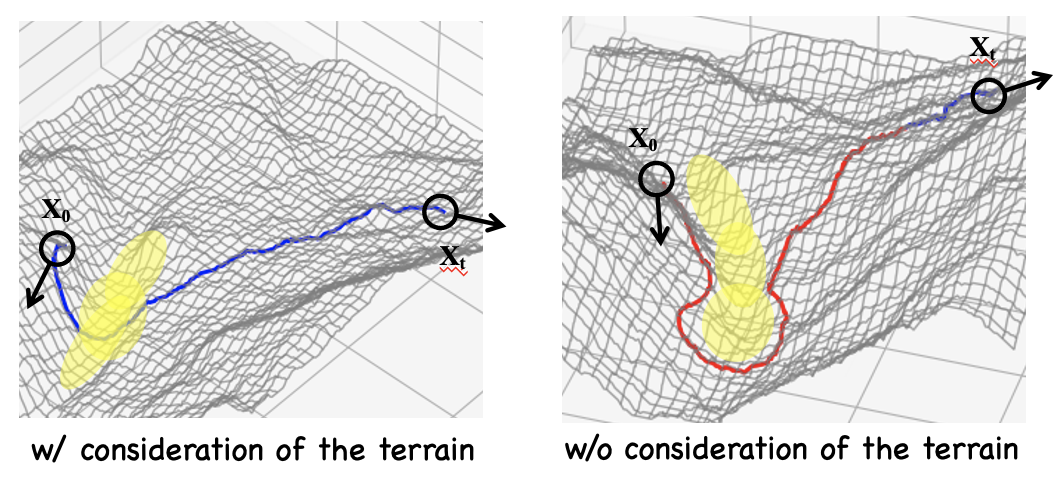 Figure: Motion planning results with and without considering the terrain traversability.
Figure: Motion planning results with and without considering the terrain traversability.